From: https://www.newsshooter.com/2024/04/12/blackmagic-design-ursa-cine-ursa-cine-17k/
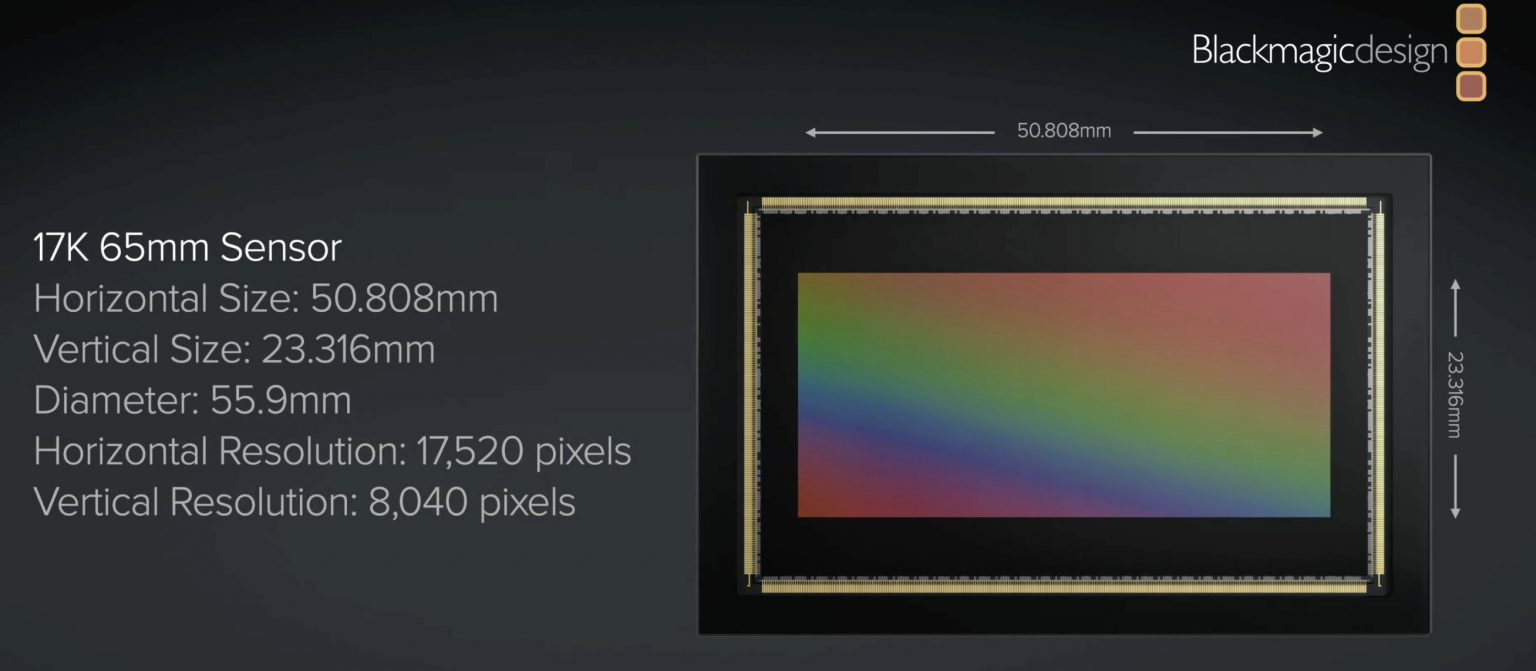
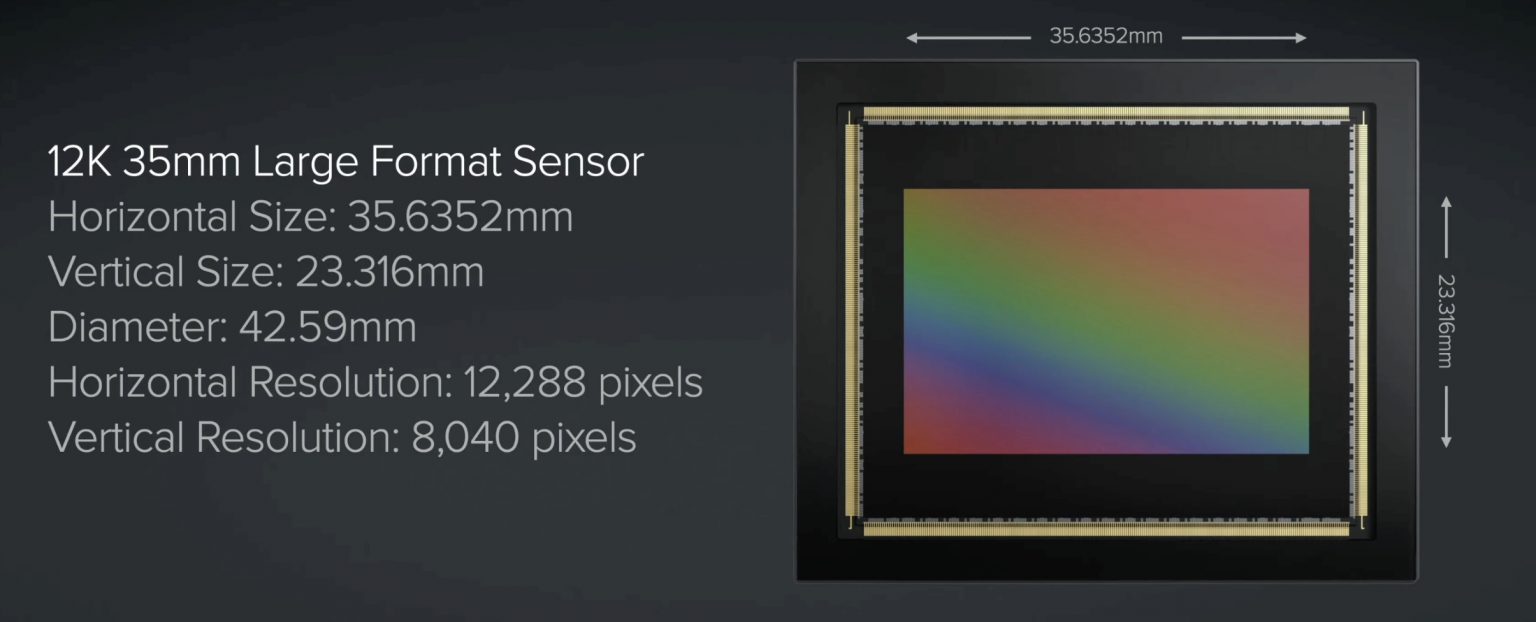
Blackmagic Design URSA Cine & URSA Cine 17K

From: https://www.newsshooter.com/2024/04/12/blackmagic-design-ursa-cine-ursa-cine-17k/
Blackmagic Design URSA Cine & URSA Cine 17K
Link: https://www.airy3d.com/airy3d-e2v-collaboration/
Teledyne e2v and Airy3D collaboration delivers more affordable 3D vision solutions
Grenoble, FRANCE, April 23, 2024 —Teledyne e2v, a Teledyne Technologies [NYSE: TDY] company and global innovator of imaging solutions, is pleased to announce a new technology and design collaboration with Airy3D (Montreal, Canada), a leading 3D vision solution provider. The first result of this partnership is the co-engineering of the recently announced Topaz5D™, a low-cost, low power, passive, 2 megapixel global shutter sensor which produces 2D images and 3D depth maps.
Arnaud Foucher, Business Team Director at Teledyne e2v, said, “We’re very excited to have collaborated with Airy3D on the development of Topaz5D, our latest unique CMOS sensor. The need to deploy alternative 3D vision solutions in different industries is crucial. Teledyne e2v’s image sensor design capability coupled with Airy3D’s proven 3D technology has allowed us to develop more 3D vision products for several market segments with a reduced cost of ownership.”
Chris Barrett, CEO of Airy3D, commented, “Airy3D uniquely combines our patented optically Transmissive Diffraction Mask (TDM) design and deep software processing know-how, enabling our partners to add value to their products. Teledyne e2v’s image sensor design, production and supply chain expertise are paramount in introducing these novel 3D solutions to the market and this initiative is a key milestone for us.”
A Topaz5D Evaluation Kit and monochrome and color sensor samples are available now for evaluations and design. Please contact Teledyne e2v for more information.
Speaker: Prof. Tobi Delbruck
Abstract: "Cameras that mimic biological eyes have a 50 year history and the DVS event camera pixel is now nearly 20 years old. Event camera academic and industrial development is active, but it is only in the last few years that we understand more about the ultimate limits on their noise performance. This talk will be about those limits: What are the smallest changes that we can detect at a particular light intensity and particular speed? What are the main sources of noise in event cameras and what are the limits on these? I will discuss these results in the context of our PhD student Rui Graca’s work on SciDVS, a large-pixel DVS that targets scientific applications such as neural imaging and space domain awareness."
Event Cameras in Automotive Sensing: A Review
Shariff et al.
IEEE Access
DOI: https://doi.org/10.1109/ACCESS.2024.3386032
Abstract:
Event cameras (EC) represent a paradigm shift and are emerging as valuable tools in the automotive industry, particularly for in-cabin and out-of-cabin monitoring. These cameras capture pixel intensity changes as ”events” with ultra-low latency, making them suitable for real- time applications. In the context of in-cabin monitoring, EC offer solution for driver and passenger tracking, enhancing safety and comfort. For out-of-cabin monitoring, they excel in tracking objects and detecting potential hazards on the road. This article explores the applications, benefits, and challenges of event cameras in these two critical domains within the automotive industry. This review also highlights relevant datasets and methodologies, enabling researchers to make informed decisions tailored to their specific vehicular-technology and place their work in the broader context of EC sensing. Through an exploration of the hardware, the complexities of data processing, and customized algorithms for both in-cabin and out-of-cabin surveillance, this paper outlines a framework encompassing methodologies, tools, and datasets critical for the implementation of event camera sensing in automotive systems.












TriEye and Vertilas Partner to Demonstrate 1.3μm VCSEL-Driven SWIR Sensing Solutions
TEL AVIV, Israel, April 16, 2024/ – TriEye, pioneer of the world's first cost-effective mass-market Short-Wave Infrared (SWIR) sensing technology, and Vertilas GmbH, a leader in InP VCSEL products, announced today the joint demonstration of a 1.3μm VCSEL-powered SWIR sensing system.
TriEye and Vertilas announce their collaboration in advanced imaging technology. This partnership has led to the development of a technology demonstrator that integrates TriEye's state-of-the-art Short-Wave Infrared (SWIR) Raven image sensor with Vertilas’ innovative Indium Phosphide (InP) Vertical-Cavity Surface-Emitting Laser (VCSEL) technology. Adopting high-volume, scalable manufacturing strategies, these technologies provide cost-effective solutions for both consumer and industrial
markets.
The system highlights the capabilities of TriEye's CMOS-based SWIR sensor, noted for its high sensitivity and 1.3MP resolution. Designed to enhance imaging in various industries, including automotive, consumer, biometrics, and mobile robots, this solution represents a significant step forward in sensing technology. Alongside, Vertilas introduces its InP SWIR VCSEL technology that provides high output power with high power efficiency. This new VCSEL technology is a complementary innovation that enhances the SWIR camera's functionality. Deploying 1.3μm VCSEL arrays enables greatly improved eye safety and signal quality while minimizing sunlight distortion. Vertilas InP VCSEL array technology also
offers wavelengths at 1.55μm up to 2μm. This new technology is expected to broaden the scope of applications in imaging and illumination across multiple industries.
"Vertilas is thrilled to expand our efforts with TriEye in this groundbreaking initiative. Our InP VCSEL technology, combined with TriEye's exceptional SWIR sensor, marks a significant advancement in the realm of imaging and illumination solutions”, said Christian Neumeyr, CEO at Vertilas. “This collaboration is more than just a technological achievement; it represents our shared vision of innovating for a better, more efficient future in both consumer and industrial applications."
"At TriEye, our commitment has always been to bring revolutionary SWIR technology to the forefront of the market. The integration of our SWIR sensor with Vertilas InP VCSEL technology in this collaborative venture is a testament to this mission”, said Avi Bakal, CEO of TriEye. “We are proud to unveil a solution that not only enhances imaging capabilities across various industries but also does so in a cost-effective and scalable manner, making advanced sensing technology more accessible than ever."
In a recent article in Optics Express titled "Watching the watchers: camera identification and characterization using retro-reflections,", Seets et al. from University of Wisconsin-Madison write:
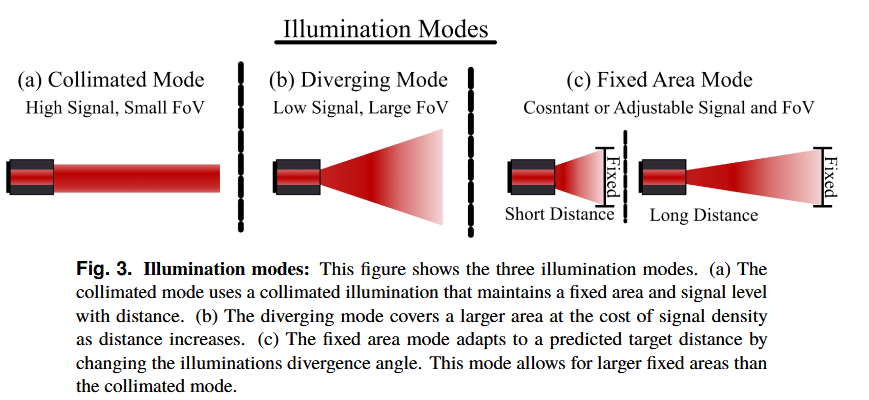
A focused imaging system such as a camera will reflect light directly back at a light source in a retro-reflection (RR) or cat-eye reflection. RRs provide a signal that is largely independent of distance providing a way to probe cameras at very long ranges. We find that RRs provide a rich source of information on a target camera that can be used for a variety of remote sensing tasks to characterize a target camera including predictions of rotation and camera focusing depth as well as cell phone model classification. We capture three RR datasets to explore these problems with both large commercial lenses and a variety of cell phones. We then train machine learning models that take as input a RR and predict different parameters of the target camera. Our work has applications as an input device, in privacy protection, identification, and image validation.
Link: https://opg.optica.org/oe/fulltext.cfm?uri=oe-32-8-13836&id=548474











|
Omnivision Principal Image Sensor Technology Engineer |
Santa Clara, California, USA |
|
|
NIST RAP opportunity - Metrology for Faint Photonics |
Boulder, Colorado, USA |
|
|
Innovative Scientific Solutions, Inc. Research Engineer |
WPAFB (Dayton), Ohio, USA |
|
|
OIP Sensor Systems Senior Electronics Design Engineer |
Oudenaarde, Belgium |
|
|
TU Delft Junior researcher |
Delft, Netherlands |
|
|
Teledyne e2v Project Manager |
Chelmsford, England, UK |
|
|
ST Microelectronics Validation Team Manager |
Edinburgh, Scotland, UK |
|
|
The Open University UK Space Detector Calibration Scientist |
Milton Keynes, England, UK |
|
|
University of Trento Ph.D. position on 3D silicon detector development |
Trento, Italy |
Canon’s 2.8 MP LI7060 CMOS sensor is equipped with an HDR drive function that achieves a wide 120 dB range at low noise levels. This wide range results in a greater ability to extract usable information even where there is a substantial difference between the lightest and darkest areas of an image. Even when using the sensor during normal drive operation, the sensor can achieve a dynamic range of 75 dB.
The LI5040 and 3U5MGXSBA global shutter image sensor employs an advanced pixel design introducing drive readout and gathering structures which help significantly reduce noise, and contributing to a wide dynamic range with a power consumption of 500mW. Equipped with a 3.4μm pixel size and all pixel progressive reading at 120fps, the 2/3” sensor size with 5.33 million effective pixels (2592 x 2056) easily allows for applications in machine vision and other industrial environments where smaller size and high performance are required. It is available in RGB, Monochrome, and a specialized RGB‐NIR color filter.
LI5030SA is a CMOS type of solid-state image sensor with a 35mm full frame effective pixel array of 19 Megapixels. It uses a global shutter function instead of a conventional rolling shutter. It enables simultaneous exposure timing for all 19 megapixels. It can output an effective 5688 x 3334 pixels of video at 57.99 fps and 12bit via 24 channels of digital signal output. LI5030SA series consists of LI5030SAC (color), LI5030SAI (RGBIR), LI5030SAM (monochrome), and LI5030SAN (Naked). LI5030SAN does not have a microlens or color filter.
The high sensitivity, resolution, and global shutter of this sensor along with multiple color filter variations makes the LI5030 a great choice for a wide array of applications such as microscopes, factory automation, traffic surveillance, drone vision, etc.
This video presents Sony's 1/3.1" global shutter image sensor IMX900 with approx. 3.2 effective megapixels that is compact, high-resolution, and has improved near-infrared sensitivity. Here are its three features.
=================================
Chapters
=================================
0:00 Opening
0:40 Compact, high resolution(1/3.1" 3.2MP)
1:12 Improved incident light angle dependency
3:00 Enhanced NIR region sensitivity
3:41 Ending
------------------------------------------------------------
This video presents Sony's IMX900 global shutter image sensor, which is ideal for industrial applications such as barcode reading, picking robot, and AMR (autonomous mobile robots).
Here are the three functions that support optimal imaging for different scenarios.
=================================
Chapters
=================================
0:00 Opening
0:27 Fast Auto Exposure
1:42 Quad HDR(High Dynamic Range)
2:22 Quad Shutter Control